Sprawozdanie z realizacji zadań wrzesień/paźdzernik 2024


- Szczegóły
- Kategoria: Laboratoria Przyszłości
- Opublikowano: czwartek, 07 listopad 2024 19:36
- Super User
- Odsłony: 1369
To już trzeci rok projektu Laboratoria Przyszłości w naszej szkole. Obecnie na zajęcia z robotyki zapisało się:
- 11 osób z klasy czwartej,
- 19 osób z klas 5,
- 6 osób z klasy 6,
Uczniowie z klas 5 i 6 kontynuują zajęcia.
Podczas zajęć z robotyki uczniowie wykorzystali:
- klocki LEGO Spike Essential
- klocki LEGO Spike Prime
- aparat fotograficzny z akcesoriami
link do wszystkich zdjęć:
Klasy czwarte - to pięć projektów. Nazwy zapożyczone z SPIKE LEGO. Były to arktyczna przejażdżka, zwierzęcy alarm, podwodna misja, diabelski młyn oraz stoisko z przekąskami.
Arktyczna przejażdżka. Uczniowie uczą się budować robota zgodnie z instrukcją. Piszą skrypt, który pozwala samochodzikowi poruszać się do przodu i tyłu. Następnie modyfikują go tak, by pojazd poruszał się po kwadracie lub prostokącie.






Zwierzęcy alarm - projekt opisywany był już wielokrotnie. Dla przypomnienia wykorzystano tu dwa elementy programowalne: czujnik kolorów oraz wyświetlacz. Dodatkowo uczniowie dołączali dźwięki gotowe lub nagrane z laptopa, podkreślające grozę sytuacji. Jak sama nazwa wskazuje włącza się alarm, w przypadku, gdy pojawi się na horyzoncie straszne zwierzę (figurka o odpowiedniej barwie). Światełka mrugają, z głośnika słychać syrenę lub nagrany głos. W momencie, gdy mija zagrożenie uczniowie ustawiali inne barwy wyświetlacza (najczęściej koloru zielonego), grała przyjemna muzyka.

Podwodna misja - projekt nawiązuje do eksploracji morza. Robot ten zanurza łódź na pewną głębokość wody, a następnie wykonuje ruch wahadłowy.



Kolejny wariant karuzeli - diabelski młyn.



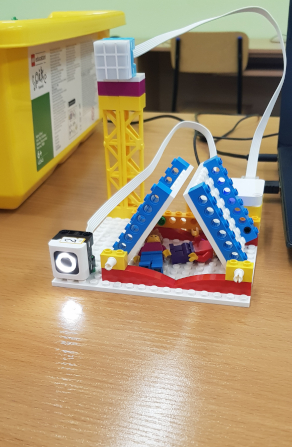
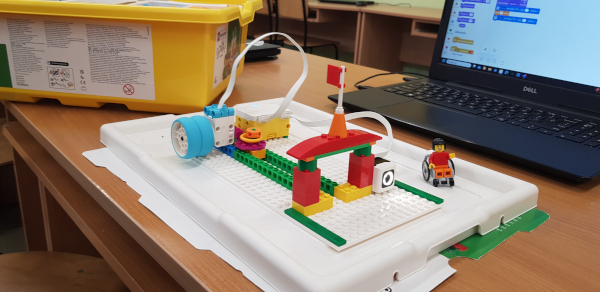
Stoisko z przekąskami. Projekt nawiązuje do obwoźnego sklepiku z kanapkami. Uczniowie oprócz zbudowania zestawu musieli odpowiednio przygotować wcześniej i nagrać krótką rozmowę klienta ze sprzedawcą i umiejętnie wstawić ją w skrypt. Dopiero później po wymianie zdań następuje sprzedaż kanapki. Robot ten składa się z jednego silnika poruszającego się po szynie, który dostarcza klientowi jedzenia oraz czujnika koloru, który rozpoczyna cały proces (rozmowy, wydanie kanapki, powrót silnika na miejsce).



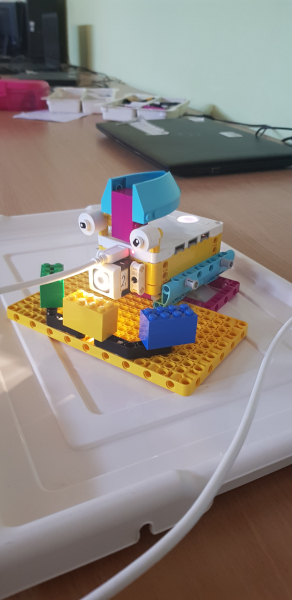
W klasach piątych i szóstej uczniowie pracowali z klockami LEGO SPIKE PRIME. Na początek (piątoklasiści) zapoznali się z zawartością zestawu, a następnie na rozgrzewkę wybrali projekt pod nazwą Pies KIKI. Robota tego również składała klasa szósta. Generalnie wykorzystano tutaj czujnik kolorów, który w zależności od wykrytej barwy wykonywał jakieś instrukcje. Młodzież tutaj pozwoliła sobie na trochę fantazji.
Pies Kiki


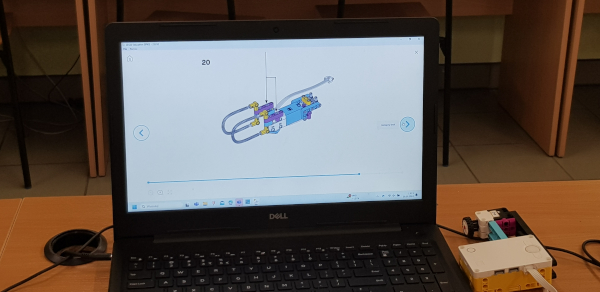
Następne projekty zgodnie z planem to wyścig skoczków i tancerz breakdance. Pochodzą one aplikacji SPIKE LEGO. W pierwszym generalnie chodziło o to, by wypróbować na skoczku różnego rodzaju odnóża i sprawdzić, które najlepiej będą się nadawały w wyścigu. Drugi to synchronizacja silników z wyświetlaczem.
W okresie tym uczniowie klas piątych zaczęli projekt pod nazwą manipulator ręczny. Po krótkiej dyskusji czym jest to urządzenie i do czego może służyć młodzież przystąpiła do montażu tego robota. Składa się on z trzech części - korpusu oraz dwóch wymiennych chwytaków. Celem projektu było wypróbowanie tych właśnie chwytaków w różnych sytuacjach.